Servisní, zásahový a záchranářský robot Hardy
Strojírny Třinec v současné době intenzivně testují prototyp servisního, zásahového a záchranářského robota HARDY, který byl vyvinut v rámci projektu MPO Tandem FT-TA5/071 „Výzkum a vývoj modulární struktury servisních zásahových a záchranářských robotů“.

Na projektu se podílely Strojírny Třinec a.s., FITE a.s. (Robotsystem s.r.o., Slezský výzkum s.r.o.), a VŠB-TU Ostrava (Katedra robototechniky).
Víceúčelovost a přizpůsobení robota konkrétní aplikaci je řešeno na bázi modularity, s využitím připojovacích interface. Principy modularity lze dále účinně rozvíjet a získávat další konkurenční výhody v oblasti servisní robotiky.
Víceúčelový robot se skládá ze tří hlavních částí:
- robustní podvozek, který zajišťuje dokonalou stabilitu
- manipulační rameno s vysokou únosností
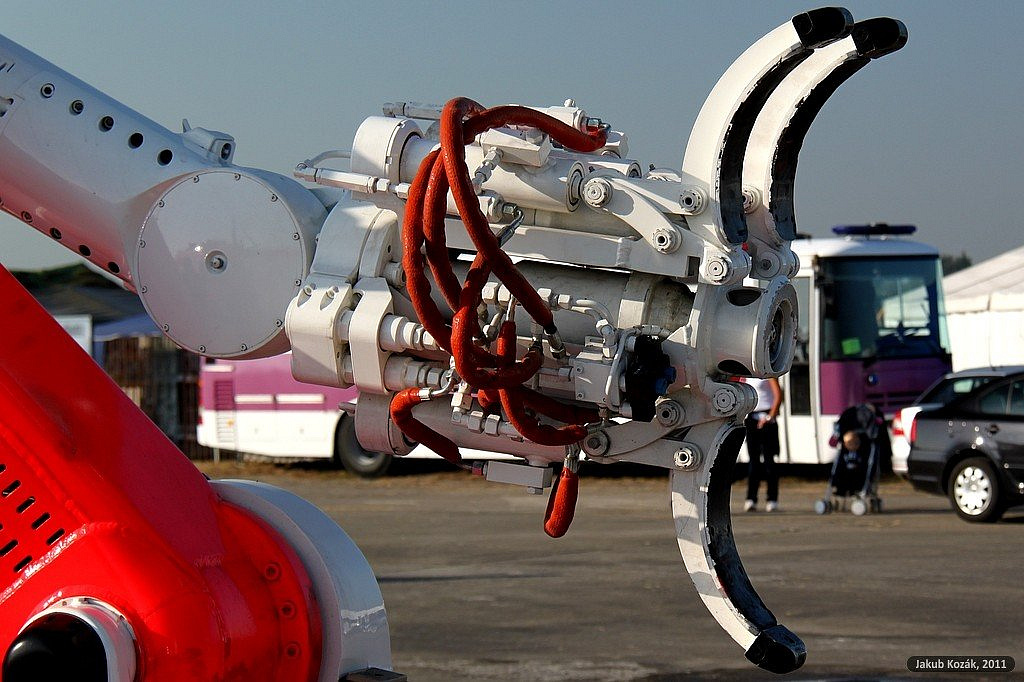
- víceúčelový efektor se třemi stavitelnými chapadly a integrovanou hasicí proudnicí.
Podvozek a pohon
Pásový podvozek má původ v mininakladači Bobcat, převzat byl i původní dieselový motor a hydraulický agregát, který byl rozšířen o další hydraulické pohony ramene a efektoru. K původnímu spalovacímu motoru byl rovněž připojen elektrický alternátor pro výrobu energie pro řídicí elektroniku a pro 400voltové stejnosměrné motory ramene.
Podvozek byl konstrukčně upraven pro uchycení manipulační nadstavby a ostatních systénů a byl rozšířen o další krytování, nárazník (nebo radlici) v přední části a prostory pro umístění prvků řídicího systému.
Manipulačí nadstavba
Manipulačí nadstavba má 5 stupňů volnosti, první 2 klouby mají rotační hydraulické pohony a další 3 klouby mají stejnosměrné elektromotory TGDrives.
Nosnost manipulační nadstavby odpovídá hmotnosti největších vyráběných tlakových lahví a činí 300 kg. Chapadlo se třemi prsty poháněnými hydraulickými válci je možno automaticky přestavovat do dvou poloh – 3 prsty po 120° nebo 2 prsty proti 1. Pro účely přestavení je efektor vybaven motory Maxon.
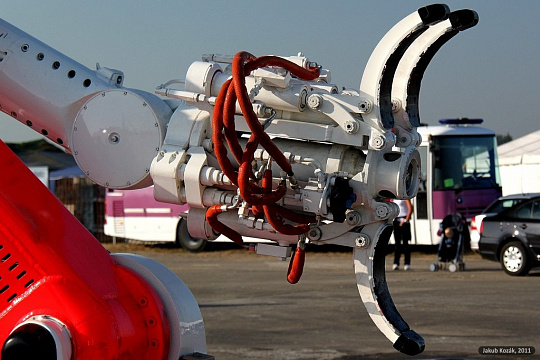
Vnitřními dutinami ramene je až do efektoru přivedena tlaková voda, která slouží jak k ochlazování vlastního ramene v případě operace robotu ve vysokých teplotách, tak k hašení pomocí trysky umístěné ve středu efektoru (mezi prsty chapadla).
Tryska navíc umožňuje regulovat šířku kužele proudící vody – pro tento účel je efektor vybaven dalším motorem Maxon. Pro ochlazování robotu v blízkosti požáru je podvozek vybaven tryskami pro vytváření vodní mlhy kolem robotu.
Řídící systém robota
Řídicí systém se skládá ze systému umístěného přímo na robotu a ze systému operátorského stanoviště. Operátor má k dispozici kufřík s počítačem a operátorskou aplikací, pomocí které řídí bezdrátově všechny funkce robotu a má vizuální zpětnou vazbu o jeho stavu.

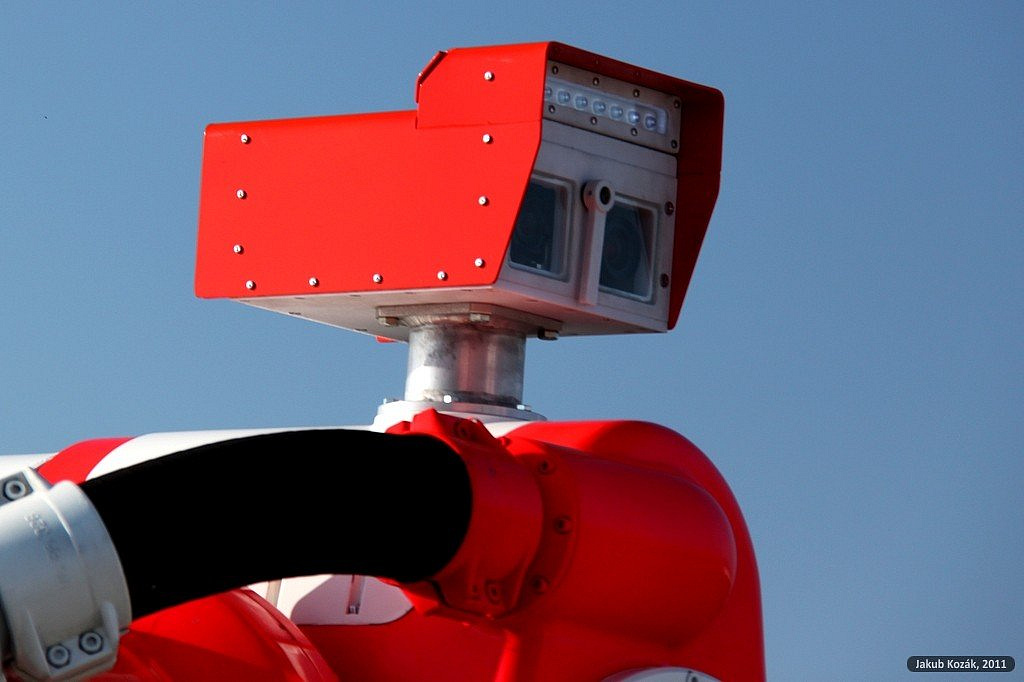
Tato zpětná vazba zahrnuje jak obrazy z kamer (včetně stereovize s 3D viděním pomocí speciálních brýlí) tak data ze senzorů a interaktivní 3D vizualizaci aktuální skutečné polohy ramene a efektoru.
Aplikace operátorského stanoviště je plně grafická, s důrazem kladeným na obraz kamer a pohodlné a přehledné ovládání s využitím bezdrátového pákového ovladače a dotykové obrazovky.
Řídicí systém robotu obsahuje především odolný průmyslový počítač, na kterém běží aplikace provádějící všechny úkony řízení na základě vstupů od operátora (obousměrná komunikace s počítačem operátora probíhá pomocí wi-fi). Páteří systému je sběrnice SynqNet, na kterou je připojena trojice měničů řídicích DC motory ramene a modul Slice I/O pro zajištění analogových a digitálních vstupů a výstupů pro řízení všech pomocných funkcí robotu, komunikaci se senzory a v neposlední řadě řízení proporcionálních ventilů hydraulických motorů ramene a efektoru. Dále systém obsahuje sběrnici CANOpen pro připojení řídicích jednotek EPOS stejnosměrných motorů Maxon v efektoru.
Řízení pojezdu využívá nezávislý bezdrátový komunikační kanál s výrazně vyšším dosahem a prostupností signálu než wi-fi. Pro pojezd byla vyvinuta speciální elektronika, která simuluje pohyby ovládací páky původního podvozku Bobcat a rovněž nahrazuje startovací klíček a další tlačítka ovládaná původně z kokpitu Bobcatu.
Katedra robototechniky VŠB TU OV se na tomto robotu podílela především kompletním navržením a realizací řídicího a senzorického systému. Na konstrukci nadstavby měl velký podíl bývalý Ph.D. student katedry.
Podvozek:
- pásový
Řízení:
- diferenční řízení (smykem)
Pohon:
- každý pás hnaný prostřednictvím jednoho kola
Motory:
- dieselový motor s hydr. agregátem a el. generátorem
- 2 rotační hydraulické motory pro pojezd
- rotační hydraulické motory pro 2 klouby ramene
- DC motory TGDrives pro 3 klouby ramene
- 3 Maxon DC motory pro funkce efektoru
- 3 hydraulické válce pro čelisti chapadla
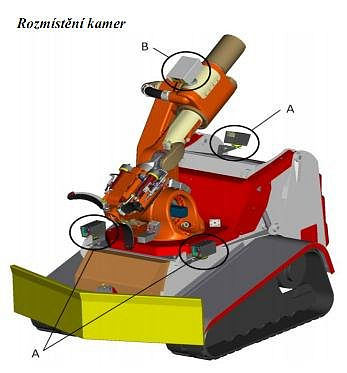
- serva pro polohování kamer
Senzory:
- inkrementální snímače polohy v pohonech ramene
- stereovizní kamerová hlava na rameni
- 2 přehledové kamery na podvozku
- couvací kamera na podvozku
Řídicí systém:
- dálkové bezdrátové řízení všech funkcí z počítače
Přenos signálů:
- Radiocrafts RC1280HP (868 MHz) pro pojezd
- Wi-Fi (2,4 GHz) pro obraz z kamer (TCP)
- Wi-Fi (2,4 GHz) pro řízení všech funkcí a signály senzorů (UDP)
Rozměry:
- celkové: 3100 × 2060 × 2910 mm
- délky článků ramene: 1250 mm, 950 mm, 973 mm
- vodorovný dosah ramene (poloměr): 2200 mm
Hmotnost:
- 4500 kg
Nosnost:
- 300 kg v chapadle
Hasící médium:
- voda, průtok 400 l/min, tlak 0,6 MPa (max. 1,2 MPa)
Rychlost jízdy:
- max. 10,6 km/h
Zdroj: Katedra robotiky VŠB-TU Ostrava a Strojírny Třinec
| Přiložené soubory | |||
|---|---|---|---|
| letak-zachranarsky-robot.pdf | zobrazit online | 948 kB | |